Indoor Rover Navigation¶
System Architecture¶
In order to start navigation rover autonomously, we need the position and orientation of the rover.
This section will guide you how to use OptiTrack Motion Capture System, how to stream position and orientation data to ROS, and feed it to your flight controller. Finally you will be able to navigate rover autonomously inside the arena.
The overall systems has following main elements:
- OptiTrack Motion Capture System
- Object to be tracker (quadcopter or rover) inside the arena
- Controller - onboard computer, usually Odroid
Let’s discuss each element in details
Motion capture system¶
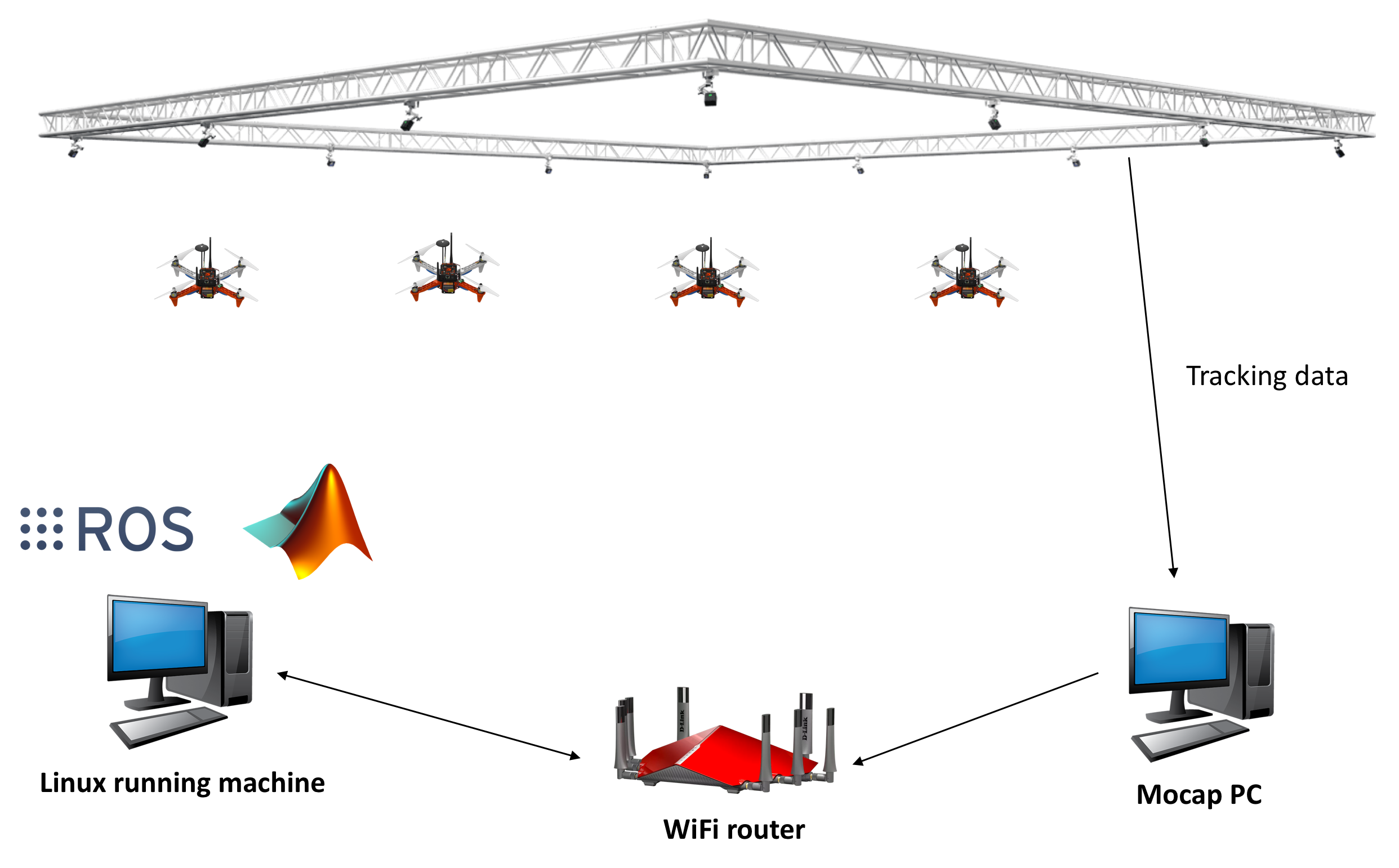
OptiTrack motion capture system (Mocap hereinafter) works as follows. The overhead cameras send out pulsed infrared light using the attached infrared LEDs, which will then be reflected by markers on the object and detected by the OptiTrack cameras. Knowing the position of those markers in perspective of several cameras, the actual 3D position of the markers in the room can be calculated using triangulation. Simply Mocap provides high precision indoor local position and orientation estimation. Position is meters and orientation is in quaternion, which can be converted Euler angles in radians. In RISC lab we use twenty Prime17w cameras that are installed in the flying arena.
All cameras are connected to a single Mocap PC through network switches. Motive Optical motion capture software is installed on this PC.
Onboard computer¶
Single board computer (SBC) which are used to control the rover in the flying arena. When a PC is used to control a drone, this referred as OFFBOARD control.
A companion computer is referred to SBC that is connected to a flight controller. Usually, SBC is used to perform more sophisticated/high computations that the flight controller can not. In other words, the flight controller is designed for low-level tasks, e.g. attitude control, motor driving, sensor data acquisition. However, the companion computer is used for high-level-control e.g. path planning, optimization.
In case of rover, PX4 does not have a controller for OFFBOARD control. Instead, we will be using RC_OVERRIDE option. We will be overriding the RC signals coming from transmitter. Now, rover will be controlled from the Odroid, which will generate needed RC signals to follow the path, or navigate to the setpoint.
Motion Capture Setup: OptiTrack¶
Camera calibration (skip for bootcamp)¶
Make sure that you remove any markers from the captured area and Area-C before performing calibration.
Make sure that you use clean markers on the Wanding stick.
The calibration involves three main steps
- Sample collections using the Wanding stick
- Ground setting using the L-shape tool
- Ground refinement
Follow this guide in order to perform the calibration.
Note
It is recommended to perform camera calibration on a weekly basis, or every couple of weeks.
OptiTrack Interface to ROS¶
Getting positions of objects in the observable OptiTrack space to ROS works as follows.
Required Hardware¶
- Mocap machine. Runs Motive Motion Capture Software.
- Optitrack Motion Capture System
- WiFi router (5GHz recommended)
- A Linux based computer, normal PC or on-board embedded computer like ODROID XU4 will work. The Linux computer should be connected to the router either via Ethernet cable or WiFi connection.
Required Software¶
- Motive. It allows you to calibrate your OptiTrack system, stream tracking information to external entities.
- ROS Kinetic installed on your Linux computer.
- The package vrpn_client_ros for ROS to receive the tracking data from the Mocap computer.
Installation¶
Odroid XU4¶
Download Ubuntu 16 with ROS Kinetic minimal image on your Ubuntu based computer.
Flash downloaded image with Etcher to ODROID XU4 eMMC. Use proper microSD adapters to plug it to your computer.
Next, expand your eMMC card to use the full space of the eMMC card. Use Gparted Partition Editor on Linux to merge unallocated space with flashed space. Choose your eMMC from the dropdown list on the right, select your partition and click Resize/Move. Click on the right black arrow and drag it until the partition has its new (desired) size, then click on the Resize/Move button. Click apply and wait until it will resize the partition.
Now connect your ODROID XU4 to monitor using HDMI cable. You will also need a keyboard, and 5V/4A power supply.
After powering the ODROID you will prompt to enter username and password. It’s all odroid. Plug the WiFi Module 4 to the ODROID’s USB port.
Check the WiFi card number by typing following command
ifconfig -a
To set a static IP address open /etc/network/interfaces file for editing by following command
sudo nano /etc/network/interfaces
Add or edit following lines to the file, and make sure it matches your WiFi network. Added lines should look similar to this.
auto wlan0 # The following will auto-start connection after boot
allow-hotplug wlan0 # wlan0 WiFi card number
iface wlan0 inet static
address 192.168.0.xxx # Choose a static IP, range for xxx is 10-254
netmask 255.255.255.0
broadcast 192.168.0.255
gateway 192.168.0.1 # Your router IP address
dns-nameservers 8.8.8.8
wpa-ssid "RISC-AreaC" # WiFi name (case sensitive)
wpa-psk "risc3720" # WiFi password
Save the file, reboot the Odroid, disconnect/connect WiFi Module, and check if you can ping any computer in the RISC network.
ping 192.168.0.101 # Mocap computer
ping 192.168.0.1 # router
If you’re receiving a reply, the network is set correctly. Power off odroid, disconnect monitor, power and keyboard. From now on we will use ssh command to access Odroid’ terminal over WiFi.
Mocap computer settings¶
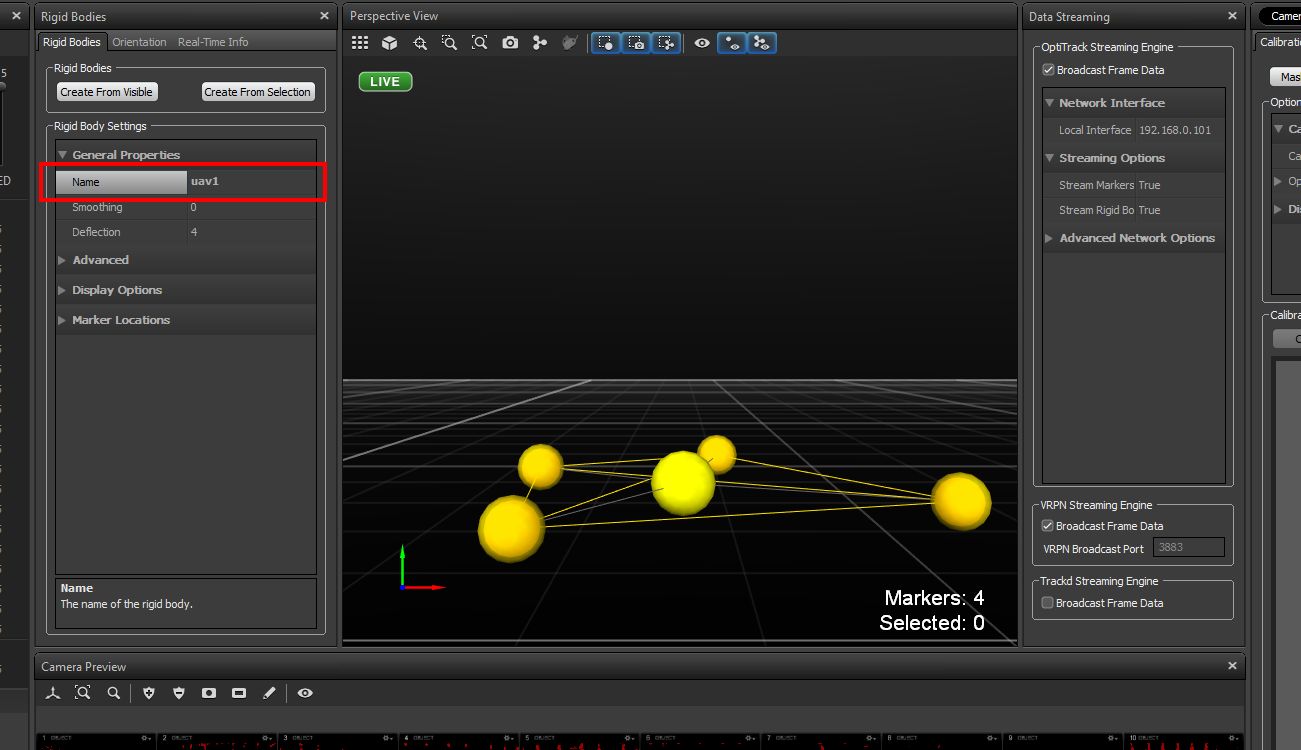
In Motive, choose View > Data Streaming from menu bar. Check the boxes Broadcast Frame Data in OptiTrack Streaming Engine and VRPN Streaming Engine sections. Place your Rigid Body Marker Base or the rover (if markers are installed on the rover) inside the cage. Create a rigid body by selecting markers of interest as show in the figure below. In Advanced Network Options section change Up Axis to Z Up.
Important
Align your robot’s forward direction with the the system +x-axis.
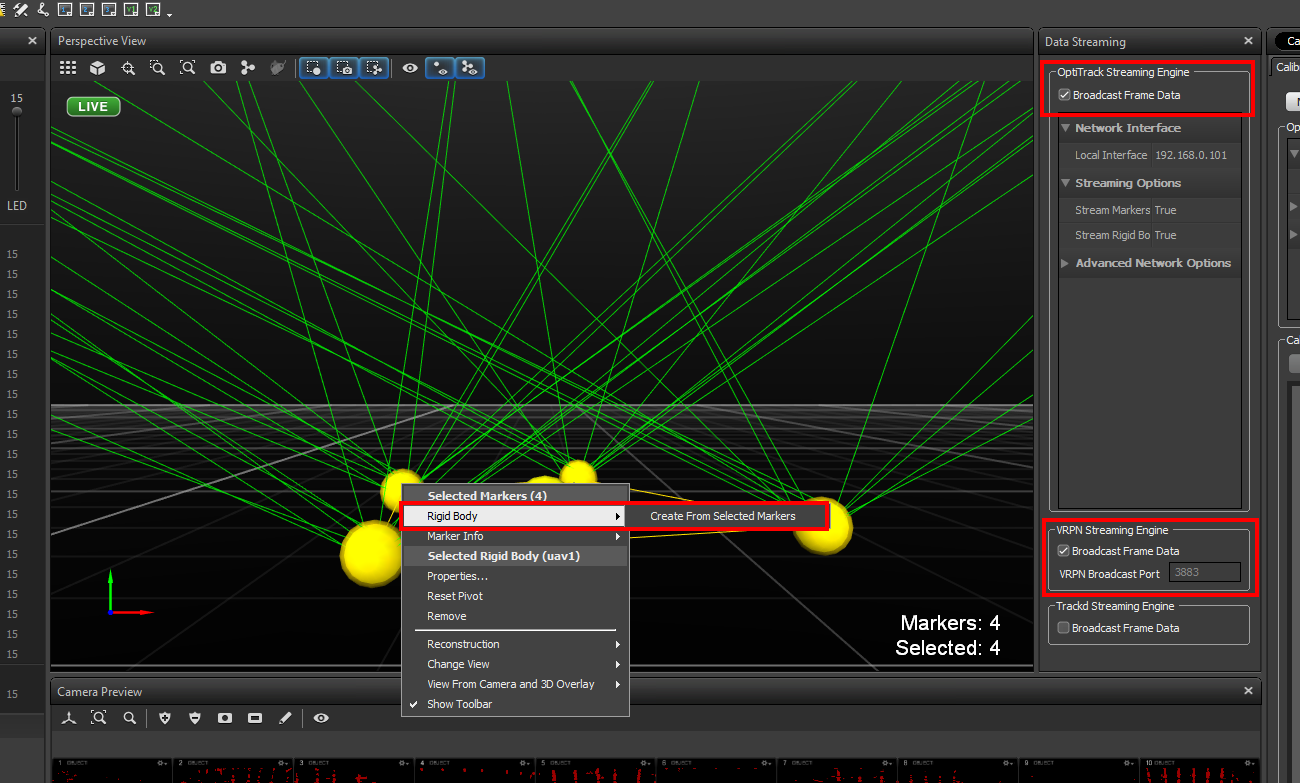
Make sure you either turn off the Windows Firewall or create outbound rules for the VRPN port (recommended).
Right click on the body created, choose Properties and rename it such that there is no spaces in the name.
Streaming MOCAP Data¶
Check the IP address assigned to the Mocap machine, in our case it’s 192.168.0.101
Power the Odroid, and use Ubuntu based computer in the lab (NUC or laptop). We will remotely access Odroid from another computer connected to the same network. Execute following command from the terminal
ssh odroid@192.168.0.xxx # the IP address you set on the Odroid previously
It will prompt the password, it’s odroid.
Now we are in the command-line of the Odroid.
To get the tracking data we need to run the vrpn_client_ros node as follows
roslaunch vrpn_client_ros sample.launch server:=192.168.0.101
Now you should be able to receive Mocap data under topic /vrpn_client_node/<rigid_body_name>/pose.
Open new terminal, ssh again, and try following command.
rostopic echo vrpn_client_node/<rigid_body_name>/pose
You should get similar to this. More information on message type here.
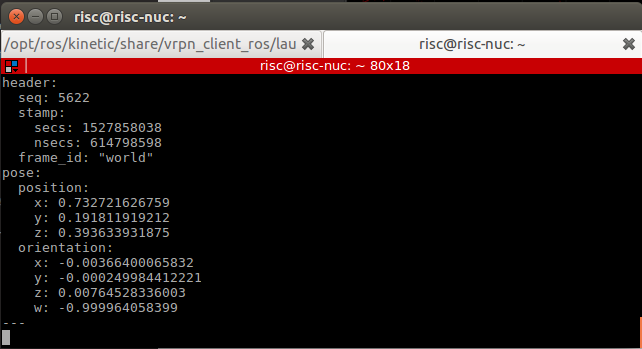
That means you are able to track you rigid body inside the arena, and get the data to the Odroid.
Feeding MOCAP data to Pixhawk¶

Intro¶
This tutorial shows you how to feed MOCAP data to Pixhawk that is connected to an ODROID, or an on-board linux computer. This will allow Pixhawk to have indoor position and heading information for position stabilization.
Hardware Requirements¶
- Pixhawk or similar controller that runs PX4 firmware
- ODROID (we will assume XU4)
- Serial connection between Odroid and Pixhawk.
- OptiTrack PC
- WiFi router (5GHz is recommended)
Software Requirements¶
- Linux Ubuntu 16 installed on ODROID XU4. A minimal image is recommended for faster executions.
- ROS Kinetic installed on ODROID XU4. Already preinstalled in the image.
MAVROSpackage: Binary installation. Already preinstalled in the image.- Install
vrpn_client_rospackage. Already preinstalled in the image.
Now, you need to set your flight controller firmware PX4, to accept mocap data. EKF2 estimator can accept mocap data as vision-based data.
Settings in QGroundControl¶
To set up the default companion computer message stream on TELEM 2, set the following parameters:
If using firmware version below 1.9.0, change the following parameters:
SYS_COMPANION= Companion Link (921600 baud, 8N1)
Starting from firmware 1.9.0, change the following parameters:
MAV_1_CONFIG= TELEM 2 (MAV_1_CONFIG is often used to map the TELEM 2 port), rebootMAV_1_MODE= OnboardSER_TEL2_BAUD= 921600 (921600 or higher recommended for applications like log streaming or FastRTPS)
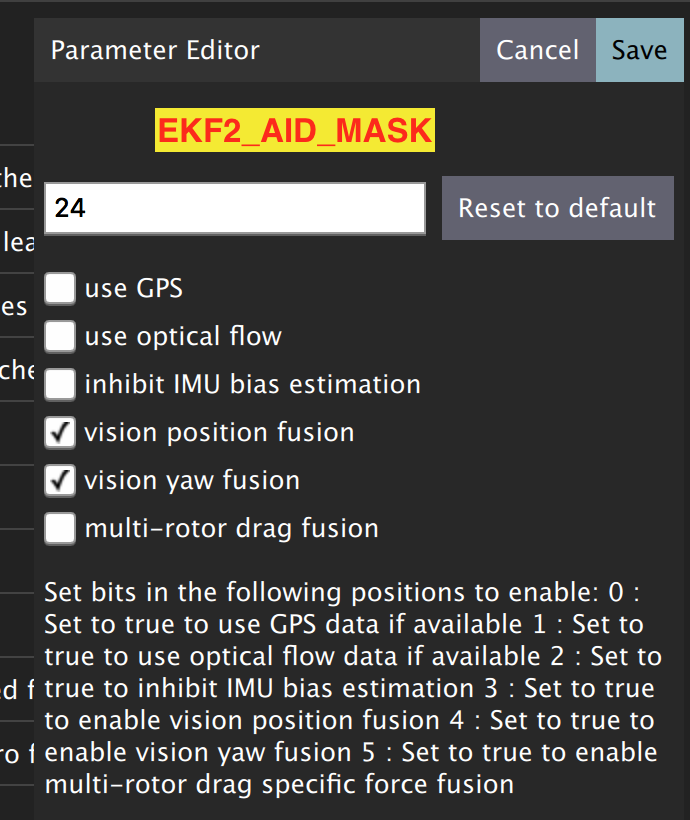
Set EKF2_AID_MASK to not use GPS, and use vision position fusion and vision yaw fusion. This way the rover will use vision for positioning.
To Enable RC stick override of auto modes, search for COM_RC_OVERRIDE in QGroundControl parameters and enable it.
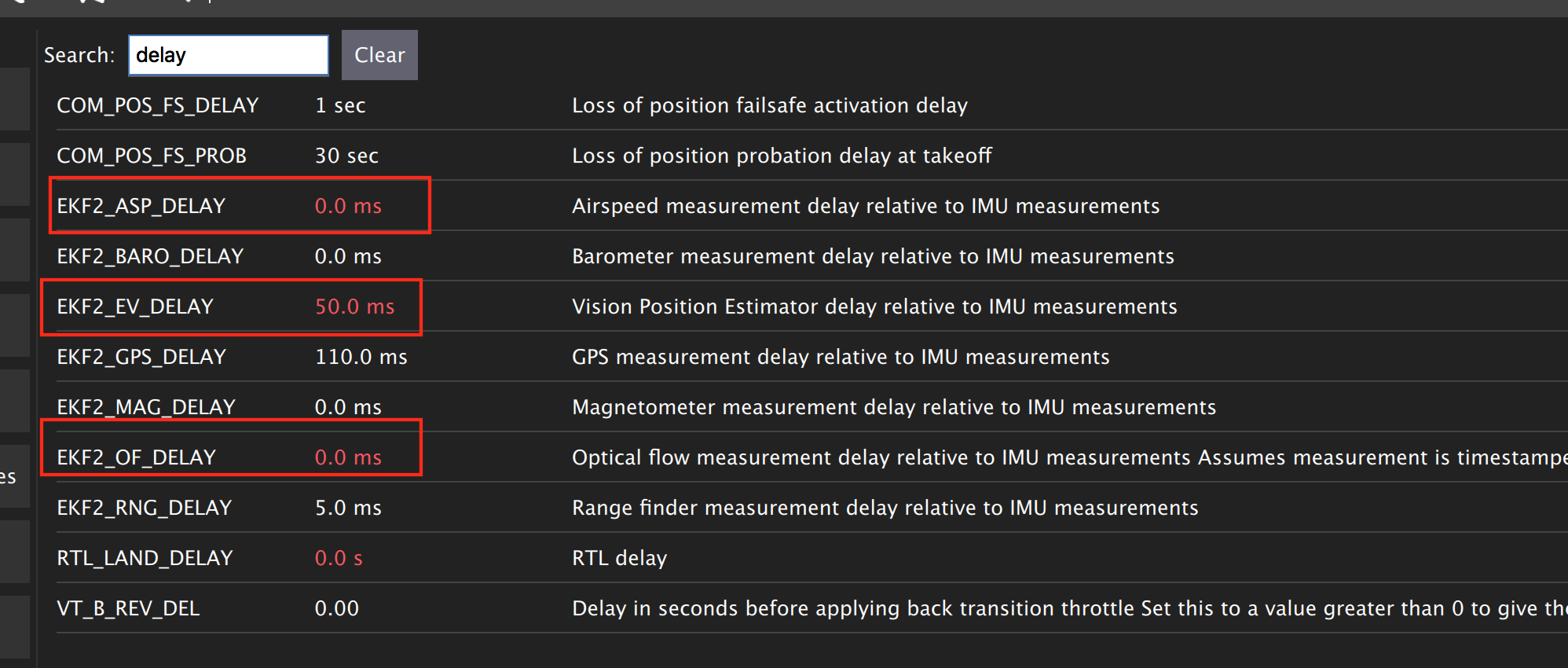
There are some delay parameters that need to set properly, because they directly affect the EKF estimation. For more information read this wiki
Choose the height mode to be vision

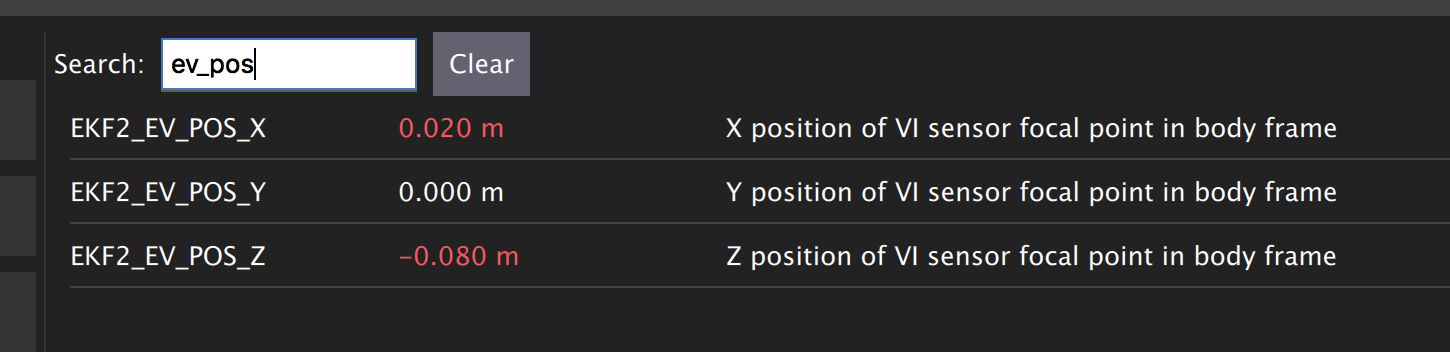
(OPTIONAL, for better accuracy). Set the position of the center of the markers (that define the rigid body in the mocap system) with respect to the center of the flight controller. +x points forward, +y right, +z down
Now Restart Pixhawk
Getting MOCAP data into PX4¶
Odroid installation¶
It’s time to mount Odroid on the rover, and connect it to the Pixhawk.
First, to power the Odroid we need to provide 5V power to it. Solder Odroid DC Plug Cable to female servo cable and connect to the UBEC 5V output cable
Next we need to connect Odroid to the flight controller using serial connection. In case of MindPX simply connect micro-USB cable to USB/OBC from the Odroid USB port. In case of Pixhawk use FTDI module. Use servo cable to solder three wires to GND, TX, and RX (refer to page 8 of the FTDI datasheet file). After that solder these three wires to corresponding TELEM2 port cable. Note that GND connects to GND, RX to TX, and TX to RX.
Plug in the DC power cable to the Odroid and check if it’s powered.
Feeding data¶
For robot to get data from Mocap we need republish the data form vprn node to mavros vision topic by relay command.
First run vrpn_client_node on your Odroid.
Next, you will need to run MAVROS node in a new terminal on Odroid
roslaunch mavros px4.launch fcu_url:=/dev/ttyUSB0:921600 gcs_url:=udp://@192.168.0.105:14550
where fcu_url is the serial port that connects ODROID to the flight controller. Use ls /dev/ttyUSB* command on your Odroid to see if serial port is connected. Parameter gcs_url:=udp://@192.168.0.119:14550 is used to allow you to receive data to QGroundControl on your machine (that has to be connected to the same WiFi router). Adjust the IP to match your PC IP, that runs QGroundControl.
MAVROS provides a plugin to relay pose data published on /mavros/vision_pose/pose to PX4. Assuming that MAVROS is running, you just need to remap the pose topic that you get from Mocap /vrpn_client_node/<rigid_body_name>/pose directly to /mavros/vision_pose/pose.
rosrun topic_tools relay /vrpn_client_node/<rigid_body_name>/pose /mavros/vision_pose/pose
Stream over MAVLink and check the MAVLink inspector with QGroundControl, the local pose topic should be in NED. Move the robot around by hand and see if the estimated local position is consistent (always in NED).